-
News
02.06.2014 | Sepios – Das neueste Unterwasser Roboter Projekt der ETH Zürich
zurück zur ÜbersichtDie Ozeane sind voll von unergründlichen Geheimnissen und sagenumwobenen Geschöpfen. Wo der Mensch einen Einblick in diese kaum erforschte Welt erhält, wird er oft in tiefes Erstaunen versetzt. Die Vielfalt der Tierwelt unter Wasser ist scheinbar grenzenlos und beeinflusst Künstler und Mediziner wie auch Ingenieure. Ein Beispiel dafür, wie die Technik von Geschöpfen aus dem Meer inspiriert wird, ist das Fokusprojekt “Sepios” an der ETH Zürich. Das Studentenprojekt befasst sich mit dem bemerkenswerten Fortbewegungskonzept von Kalmaren und Sepien, welche zur Unterklasse der Tintenfische gehören. Diese Tiere verfügen über zwei Seitenflossen, die sich entlang ihres stromlinienförmigen Körpers erstrecken. Kalmare vollführen mit ihren Flossen wellenartige Bewegungen, um unter Wasser Schub zu erzeugen. Ihre näherungsweise symmetrische Körperform erlaubt es ihnen dabei, sich vorwärts wie rückwärts praktisch gleich gut fortzubewegen. Sie sind ausserdem in der Lage, sehr rapide aus voller Fahrt abzubremsen und in die Gegenrichtung zu beschleunigen.
Fasziniert von diesem Antriebsmechanismus starteten neun Studierende in Maschinenbau und Elektrotechnik ihr Bionikprojekt im Sommer 2013 beim Autonomous Systems Lab (ASL) am Maschinenbaudepartement der ETH Zürich. Ihr Ziel ist die Entwicklung und Herstellung eines flossengetriebenen Unterwasserroboters. Die den Kalmaren nachempfundenen Seitenflossen sollen dem Roboter erlauben, sich omnidirektional unter Wasser fortzubewegen.
Das Antriebskonzept der Kalmare ist in vielerlei Hinsicht von technischem Interesse: Es handelt sich um extrem effiziente Raubtiere, welche in der Lage sind, sehr präzise unter Wasser zu manövrieren. Ihre Flossen erzeugen zwar Wirbel im Wasser, welche etwaige Beutetiere aufschrecken könnten; diese lassen sich jedoch durch geschickt gewählte Flossenbewegungen von der Beute fortlenken. Damit eignet sich das Konzept zum Beispiel für Filmaufnahmen von Meereslebewesen, die von einem propellerbetriebenen Gerät aufgeschreckt und verscheucht würden. Die hohe Flexibilität erlaubt zudem das Navigieren durch enge Röhren und Spalten, was beispielsweise bei der Untersuchung von Schiffswracks und Unterwasserhöhlen nützlich sein könnte. Dazu kommt, dass die Seitenflossen im Vergleich zu herkömmlichen Propellerantrieben viel weniger dazu tendieren, sich in Algen oder Seegras zu verfangen. Nicht zuletzt könnte man sich die optisch ansprechenden Flossenbewegungen auch zu Entertainment-Zwecken in grossen Aquarien vorstellen. Dort könnte der Roboter während einer Fischfütterung Nahaufnahmen der Tiere für die Besucher auf einen Bildschirm übertragen.
All diese Ideen lassen sich leider nicht in den zwei Semestern, welche für das Projekt zur Verfügung stehen, realisieren. Daher konzentrieren sich die Studierenden darauf, die hohe Manövrierbarkeit zu demonstrieren, welche das Antriebskonzept verspricht. Das ist der Grund, warum die Omnidirektionalität des Roboters als wichtigstes Ziel definiert wurde. Um dieses sicher erreichen zu können, wird der Roboter, im Gegensatz zum natürlichen Vorbild, mit vier Flossen konzipiert, welche sich modular anbringen und wieder demontieren lassen. Die Konstruktionsphase endete kurz vor Weihnachten 2013. Mit Beginn des kommenden Frühlingssemesters beginnt die Montage und erste Steuerungsversuche.
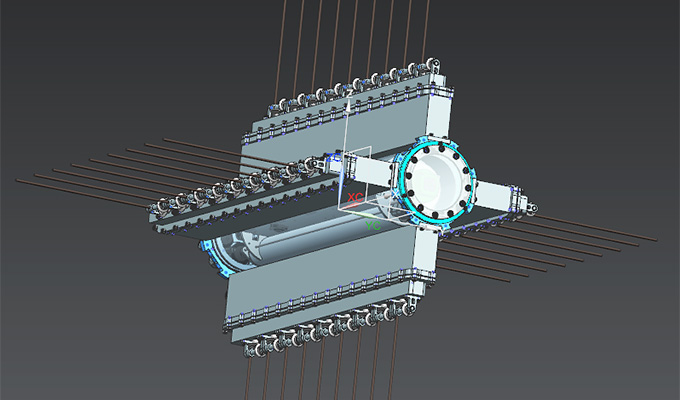
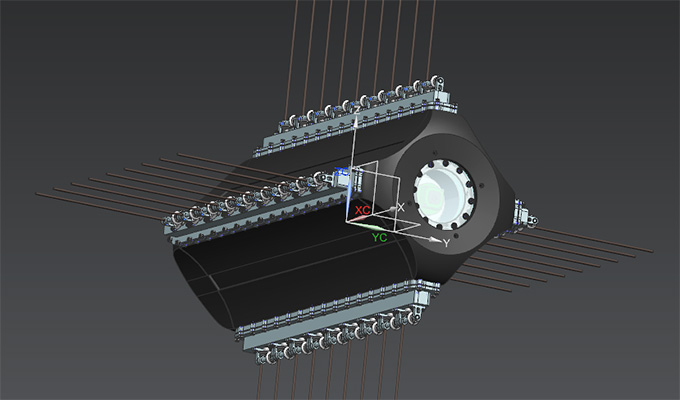
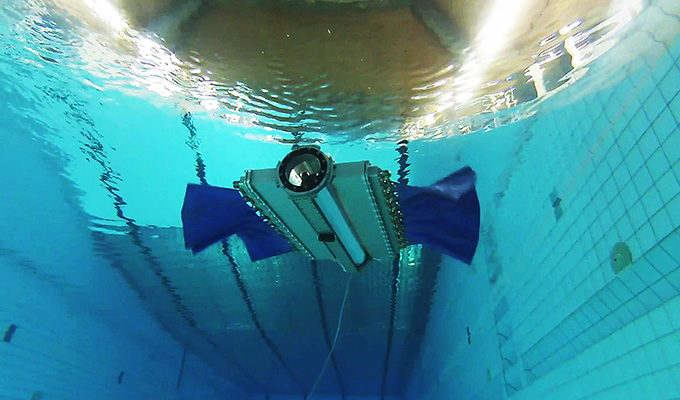
Den Rumpf des Geräts bildet ein etwa 60cm langer Zylinder aus Acrylglas mit ca. 12 cm Durchmesser, welcher in ein Aluminiumskelett eingefasst ist. Viele der Teile am Rumpf basieren dabei auf einem bereits vorhandenen Roboter, der ebenfalls an der ETH entwickelt wurde. Blickt man auf den Deckel dieses Zylinders, so sieht man die vier Flossen sternförmig im 90°-Winkel um den Rumpf herum angeordnet. Sie erstrecken sich beinahe vom Bug bis zum Heck. Die Aktuatoren der einzelnen Flossen werden in Aluminiumgehäusen untergebracht, von denenjedes neun Servomotoren und die für deren Betrieb nötige Elektronik enthält. Im kompletten System werden also insgesamt 36 Servos verbaut. Jeder davon ist über eine Kupplung an einer Antriebswelle befestigt, welche sich teils im trockenen Gehäuse, teils im Wasser befindet. Draussen wird dann das Drehmoment mittels eines Kegelradgetriebes auf eine zweite Welle übersetzt, welche parallel zum Rumpf liegt. An jeder dieser äusseren Wellen ist je ein 25cm langes Stäbchen befestigt, welches zunächst vom Roboter weg ins Wasser zeigt. Über diese Stäbchen wird schlussendlich eine elastische Folie gespannt, welche gemeinsam mit den Stäbchen die eigentliche Flosse bildet. Das Ansteuern eines Servos bewirkt also die Auslenkung eines Stäbchens und damit des jeweiligen Flossensegments.
Für das Projekt Sepios war die Dichtungstechnik ein zentrales Thema. Die Studierenden sind daher sehr dankbar für die Unterstützung, welche sie durch die Kubo Tech AG erhalten haben. Kubo Tech AG hat einerseits das Studentenprojekt des Teams Sepios im Bereich Dichtungstechnik fachlich beraten und andererseits die diversen Dichtungen gesponsert.
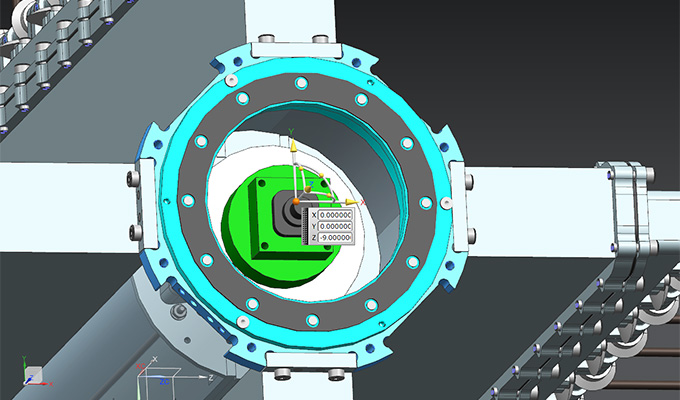
Abzudichten sind zunächst einige Stellen am Rumpf, welche statisch gedichtet werden müssen, da der Rumpf die gesamte Steuerelektronik enthält. Die Deckel am Bug und am Heck werden mit O-Ringen abgedichtet. Der Rumpf beinhaltet ausserdem eine Schwimmblase bestehend aus einem kleineren Acrylglaszylinder. In diesem bewegt sich ein Kolben vor und zurück, flutet so die Schwimmblase mit Wasser und leert sie wieder, um Ab- bzw. Auftrieb zu erzeugen. An diesem Kolben wird ebenfalls ein O-Ring verwendet, um das Eindringen von Wasser durch die Schwimmblase hindurch zu verhindern. Am Bug befindet sich zudem eine Art Bullauge, welches mittels einer Flachdichtung abgedichtet wird, die zu diesem Zweck speziell angefertigt wird. Durch das Bullauge soll später eine Kamera Bilder der Umgebung aufnehmen können. Im Deckel am Heck sind verschiedene Stecker integriert, durch welche die Versorgungskabel durchs Wasser hindurch zu den Flossengehäusen führen. Diese Geometrie erlaubt den modularen Aufbau, bei dem die Zahl der montierten Flossen zwischen eins und vier variiert werden kann. Die Servogehäuse beinhalten sowohl je eine statische Flachdichtung als auch mehrere dynamisch beanspruchte Vierlippen-Dichtringe. Die Flachdichtung ist ebenfalls eine Spezialanfertigung, welche am Deckel des Gehäuses verwendet wird. Die Vierlippendichtringe werden an den Antriebswellen in einen Hinterstich eingesetzt beim Übergang vom trockenen Innenraum ins Wasser. Die Drehzahlen liegen selten über einem Hertz und der Druckunterschied von einem Bar dürfte ebenfalls unkritisch sein.
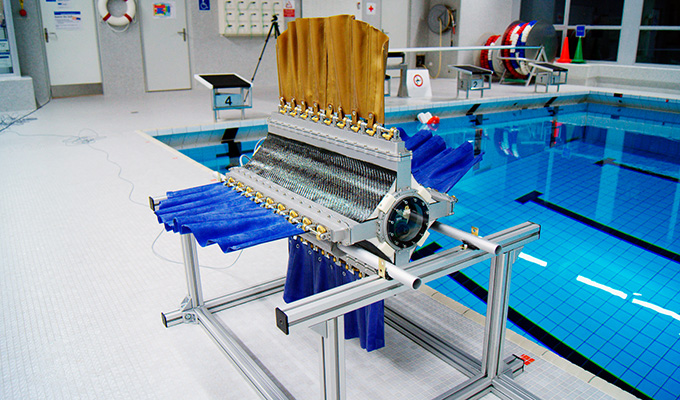
Der Roboter wird hauptsächlich in Hallenbädern getestet werden. Um sicherzugehen, dass das chlorhaltige Wasser die Funktion der Dichtungen nicht beeinträchtigt, wurde meistens FPM-Viton® als Material gewählt. Nach der Montage Ende Februar wurden diese Komponenten dann zum ersten Mal getestet. Am 27. Mai findet dann das Rollout in der Haupthalle der ETH Zürich statt, an dem das Fokusprojekt Sepios der Öffentlichkeit präsentiert wird.
Kubo Tech AG freut sich ausserordentlich, dieses Projekt zu unterstützen und wünscht dem Projektteam viel Erfolg!
Weitere Informationen zum Projekt Sepios finden Sie hier.



 Facebook
Facebook Google+
Google+ Xing
Xing Weiterempfehlen
Weiterempfehlen